Connected and Automated Vehicles in Adverse Weather
A VISSIM-based advanced traffic modeling project evaluating how Connected and Automated Vehicles may improve traffic performance under normal, fog, and rain conditions along Madison's Beltline corridor. The study compared human-driven vehicles and CAVs using weather-based speed reductions, Wiedemann 99 car-following parameters, lane-changing behavior, and performance metrics such as delay, stops, stop delay, and speed.
Project Details
Overview
A graduate advanced traffic modeling study using PTV VISSIM to evaluate how Connected and Automated Vehicles (CAVs) may improve traffic performance under normal, fog, and rain conditions along the Beltline corridor south of Madison, Wisconsin. The work compared a human-driven vehicle (HDV) baseline against a CAV scenario across three weather environments and quantified performance differences in delay, stops, stop delay, and average speed.
Tools Used
PTV VISSIM · Wiedemann 99 Car-Following Model · Lane-Changing Parameters · Weather-Based Speed Reductions · MOE Evaluation · Scenario Comparison · Excel
My Role
Built and calibrated the VISSIM network for the Beltline study area, set up Wiedemann 99 car-following and lane-changing parameters for both HDV and CAV behavior, applied weather-based desired-speed reductions for fog and rain, ran the scenarios, and interpreted the resulting MOEs.
Method
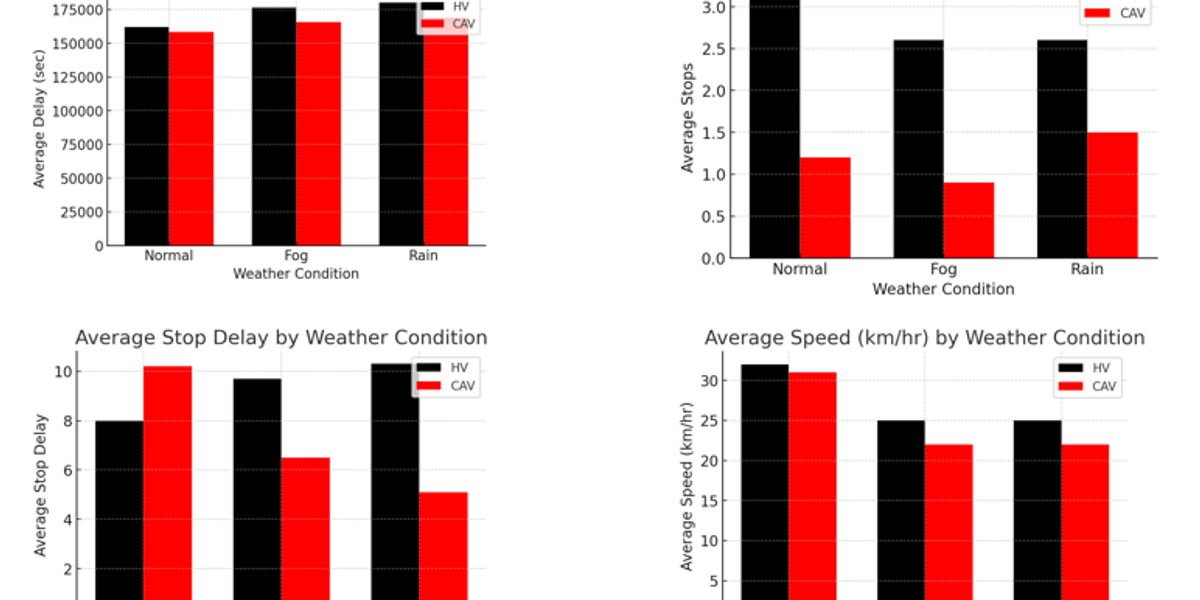
The corridor was modeled in PTV VISSIM with the Wiedemann 99 car-following framework, which exposes parameters such as standstill distance, headway time, and following variation that can be tuned to represent more disciplined CAV behavior compared with human drivers. Weather conditions were represented by reducing desired speeds and adjusting following behavior to reflect reduced visibility (fog) and reduced pavement friction (rain). Lane-changing aggressiveness was also set differently for HDVs and CAVs. Each combination of vehicle type (HDV vs. CAV) and weather state (normal, fog, rain) was simulated and compared on delay, total stops, stop delay, and average speed.
Key Outcomes
- Set up paired HDV and CAV scenarios under normal, fog, and rain conditions on a realistic Madison Beltline network.
- Showed that adverse weather degrades operations for both vehicle populations, but CAVs preserved more of the corridor's normal-condition performance than HDVs.
- Found that tighter, more consistent CAV car-following and smoother lane-changing reduced delay and stop delay relative to HDVs across all weather states.
- Quantified average speed recovery under CAVs in fog and rain compared with the HDV baseline.
Limitations
Results are tied to the Wiedemann 99 parameter assumptions used for CAV behavior, which approximate but do not perfectly represent real automated-driving systems. Weather effects were modeled through speed-reduction and following-behavior adjustments rather than detailed vehicle-dynamics or sensor-degradation models. The study was bounded to the modeled Beltline segment and the simulated demand levels, so corridor-wide and network-spillover effects were not captured.
Related Projects

John Nolen Drive Traffic Flow Improvement
Traffic Control / VISSIM Simulation
A graduate traffic-control project using PTV VISSIM, HCS, and Excel to evaluate 2035 traffic growth and improvement strategies along John Nolen Drive in Madison. I led the analysis and quality control, comparing no-build, signal-optimized, and geometry-refined scenarios. Results showed 2035 growth could increase delay by 60–85% and queues by 3×, while signal and geometry improvements provided targeted but capacity-limited benefits.
Open
North Mendota Parkway Design
Highway Design / Civil Infrastructure
A graduate highway-design project developing a conceptual 4.75-mile North Mendota Parkway corridor in Dane County. The work evaluated alternative alignments, farmland/hydrologic/terrain constraints, vertical and horizontal geometry, AASHTO Green Book design standards, traffic forecasting, and six intersection concepts to support a rural principal arterial design.
Open
Fair Fares or Financial Burdens?
Urban Transportation Planning / Transit Equity
A graduate urban transportation planning project reviewing transit fare policy through equity, affordability, and financial-sustainability lenses. The study examined how fare structures can burden low-income, zero-car, and suburban riders, and evaluated tools such as fare capping, means-based discounts, fare-free pilots, and account-based fare systems using Madison as a local application case.
Open