CAV Efficiency at Stop-Controlled Intersections
A MATLAB simulation project evaluating how Connected and Automated Vehicles could improve operations at stop-controlled intersections. I developed a simulation framework comparing HDV and CAV parameters, added a safety-check conflict-resolution algorithm, and tested performance through a detailed single-run case and 50,000 randomized multi-run trials across varying intersection complexity.
Project Details
Overview
A graduate MATLAB simulation project evaluating how Connected and Automated Vehicles (CAVs) could improve operations at stop-controlled intersections compared with human-driven vehicles (HDVs). The work developed a custom simulation framework that contrasts HDV and CAV operating parameters, layers a safety-check conflict-resolution algorithm on top of the scheduling logic, and quantifies throughput and delay performance through both a detailed single-run case and a large-scale randomized multi-run experiment.
Tools Used
MATLAB · Discrete-Event Simulation · Headway & Switching-Time Modeling · Block-Priority Scheduling · Safety-Check Conflict Resolution · Monte Carlo / Multi-Run Experimentation
My Role
Designed and implemented the simulation framework end-to-end: parameterized HDV vs. CAV behavior, built the scheduling and safety-check logic, ran the detailed single-run case, set up and executed the 50,000 randomized multi-run experiment, and interpreted the comparative results.
Method
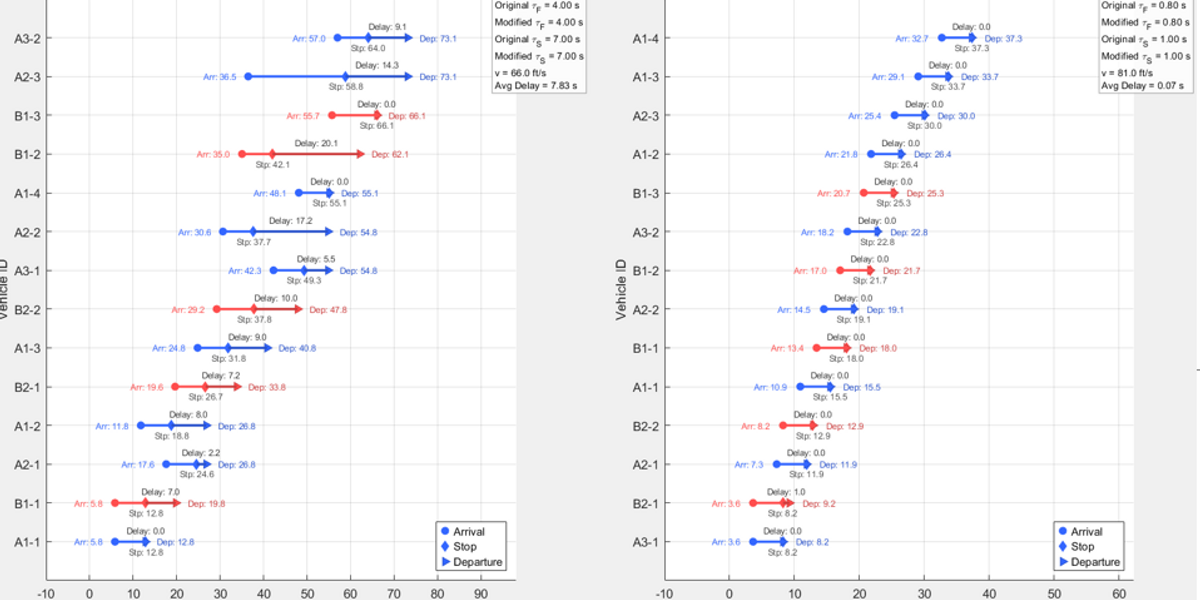
The framework modeled vehicles arriving at a stop-controlled intersection with separate parameter sets for HDV and CAV behavior — including following headways, switching times between conflicting movements, and reaction characteristics. A block-priority scheduler assigned the next conflict-free movement, and a safety-check algorithm sat on top of the scheduler to resolve conflicts before they could materialize. Performance was first explored through a detailed single-run case to validate logic and surface intersection-level dynamics, then evaluated at scale through 50,000 randomized trials sweeping over intersection complexity (number of approaches, demand mix, and arrival randomness) so that the comparison between HDVs and CAVs would generalize beyond a single configuration.
Key Outcomes
- Built a working MATLAB simulation framework that supports both HDV and CAV parameter sets at stop-controlled intersections.
- Added a safety-check conflict-resolution layer on top of block-priority scheduling so that CAV efficiency gains are not produced by unsafe assumptions.
- Used a detailed single-run case to validate the model and illustrate intersection-level behavior.
- Ran a 50,000-trial randomized multi-run experiment across varying intersection complexity to test how robust the CAV gains are.
- Showed that CAVs reduced delay and increased throughput relative to HDVs, with the gap growing as intersection complexity and demand increased.
Limitations
The framework abstracts vehicle behavior to scheduling-level parameters rather than full vehicle dynamics or sensor models, so it captures coordination benefits more cleanly than physical control limits. The safety check is rule-based and assumes reliable communication between CAVs — degraded connectivity, mixed-fleet edge cases, and pedestrian/bicycle interactions were not modeled. Results are bounded to stop-controlled intersection geometries and do not directly translate to signalized or uncontrolled cases.
Related Projects

John Nolen Drive Traffic Flow Improvement
Traffic Control / VISSIM Simulation
A graduate traffic-control project using PTV VISSIM, HCS, and Excel to evaluate 2035 traffic growth and improvement strategies along John Nolen Drive in Madison. I led the analysis and quality control, comparing no-build, signal-optimized, and geometry-refined scenarios. Results showed 2035 growth could increase delay by 60–85% and queues by 3×, while signal and geometry improvements provided targeted but capacity-limited benefits.
Open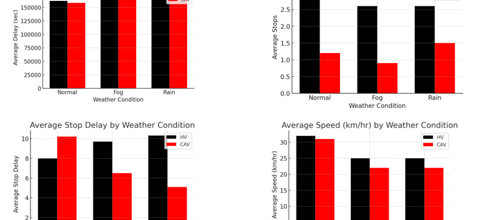
Connected and Automated Vehicles in Adverse Weather
Advanced Traffic Modeling / CAVs
A VISSIM-based advanced traffic modeling project evaluating how Connected and Automated Vehicles may improve traffic performance under normal, fog, and rain conditions along Madison's Beltline corridor. The study compared human-driven vehicles and CAVs using weather-based speed reductions, Wiedemann 99 car-following parameters, lane-changing behavior, and performance metrics such as delay, stops, stop delay, and speed.
Open
North Mendota Parkway Design
Highway Design / Civil Infrastructure
A graduate highway-design project developing a conceptual 4.75-mile North Mendota Parkway corridor in Dane County. The work evaluated alternative alignments, farmland/hydrologic/terrain constraints, vertical and horizontal geometry, AASHTO Green Book design standards, traffic forecasting, and six intersection concepts to support a rural principal arterial design.
Open